





8月10日的一起交通事故,讓自動駕駛又成了爭議的焦點。
一輛小鵬P7在高架路上,追尾撞上了一輛停靠在路上的故障車,站在前車車尾的人被撞飛身亡。
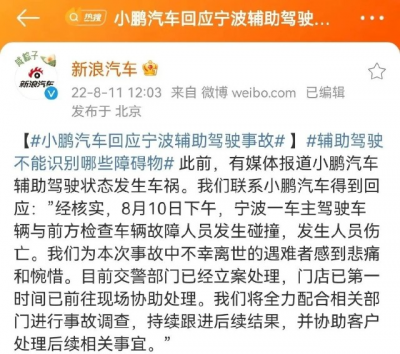
網傳小鵬車主的聊天記錄稱,他當時开啓了駕駛輔助系統,但車輛在撞擊前沒有發出任何警告,也沒有做出剎車動作——車輛沒有識別出前方路況。
小鵬方面回應媒體稱,交警部門已經立案處理,小鵬將全力配合相關部門進行事故調查,並協助客戶處理後續相關事宜。小鵬沒有回應車禍時車主是否开啓了輔助駕駛功能。
又一次血的教訓,引發了人們對自動駕駛安全性的擔憂。
在半年前,小鵬汽車剛發生過一起類似事故。一位湖南岳陽的小鵬P7車主,在开啓輔助駕駛功能的狀態下,撞上一輛前方橫停的側翻車輛,幸好沒有造成人員傷亡。
再往前推,一年前,蔚來ES8一位車主,在沈海高速涵江段开車撞上一輛公路養護車,不幸逝世。根據當時的報道,知情人士稱,他啓動了輔助駕駛功能,但車輛未能識別車道內前方的樁桶和養護車。
故障車、側翻車、養護車,是這三起事故爆發的導火线,它們都是靜止物體。
對靜止物體的識別,直到今天依然是自動駕駛的一大難題。這個難題在過去已經造成了多起車禍,類似的事故在未來或許還會繼續出現。
自動駕駛爲什么就是識別不了靜止物體?對於這項新技術,還值得車主們繼續信任嗎?
誰釀成了這場車禍?
小鵬P7的這起事故,目前警方還沒有給出定論,但結合公开的路面視頻和相關資料,我們嘗試大致還原事件經過。
事故中涉及到三方——小鵬P7車主、小鵬的輔助駕駛系統、故障車。事故的發生,是因爲前車發生故障,停在了高架橋路段最左側的快車道上,在車道上正常行駛的小鵬P7,沒有剎車或避讓,發生了追尾。
問題是,小鵬P7爲什么沒有發現前面的故障車?
網傳小鵬P7車主的說法是,他开了輔助駕駛系統,系統沒識別,正巧當時自己還分神了。
在高架橋路段,車道上突然出現一個靜止物體,這是自動駕駛中最容易出事故的場景。而本次事故的場景比正常情況還要更復雜一些。
首先,前車是停在高架橋最左側的快車道上,車道上的車輛車速非常快,後車要避讓的話只能向右側車道變道;其次也是更關鍵的,前車停下後,車主下車打开了後備箱,後來又關上後備箱站在車尾。

有分析認爲,前車車尾站人的狀態,可能導致車輛無法識別。因爲小鵬P7要識別遠方前車,主要靠傳感器識別前車尾蓋和尾燈特徵。
不過在這起事故裏,小鵬P7不僅沒有識別出前方車輛,也沒有識別出車輛後的人。
攝像頭和毫米波雷達,是輔助駕駛系統中最重要的兩個傳感器。2020年初推出的小鵬P7,XPILOT 2.5系統搭載了5個攝像頭、3個毫米波雷達,XPILOT 3.0系統升級成14個攝像頭、5個毫米波雷達。
攝像頭跟人眼一樣,看到的是圖像,毫米波雷達看到的是波段,利用多普勒現象來感知物體的相對速度和角度。小鵬P7通過安裝在前風擋玻璃上的攝像頭探測車道线,車輛前向毫米波雷達探測前車距離和障礙物。
按照網傳小鵬P7事故車主的說法,他那輛車是XPILOT 2.5系統。一位汽車行業人士對深途分析,XPILOT 2.5的輔助駕駛配置,攝像頭可以識別目標類型,但是對於行人的識別一般超過60公裏/時的車速就都很難了;毫米波雷達會過濾掉靜止目標,一般只有毫米波雷達和攝像頭同時認爲在同一點有靜止目標,才會具備較高的置信度用於規控。
如果按網傳聊天記錄,車主當時設定的車速是80km/h,則已經超過了車輛感知系統對行人的識別範圍。
軟件工程師“數據裏奧斯”對深途說:“小鵬P7前車的狀態,對於輔助駕駛系統而言肯定是更大的幹擾。而且跟車速也有關系,車速越快計算反應越慢。”
自動駕駛業內人士劉菲鴻對深途分析,“從事故視頻來看,那個場景對於輔助駕駛的感知任務來說是一個corner case,也就是目前落地的感知技術難以解決的場景。”
靜態物體,爲何成了高速路“天坑”?
爲什么高速路上的一個靜止物體,會成爲感知系統的corner case?識別出靜止物,究竟難在哪?
數據裏奧斯認爲,車輛行駛時,系統並不是不能識別靜止的物體,而是不能准確地將對本車行駛有影響和幹擾的靜止物體篩選出來。“其實都可以識別出來,但是沒辦法判斷到底要不要避讓,因爲道路上的這些靜止物體不好標記,標記出來又很容易被誤判。”
這可以理解爲:寧可不識別,也不能經常誤剎車。“比起經常幽靈剎車,識別不出來更容易寬容。”他說。
這裏涉及到的感知設備,就是我們在上文提到的攝像頭和毫米波雷達。攝像頭需要用機器學習來訓練識別物體,毫米波雷達靠電磁波的反射情況來識別測距。
但這兩個傳感器都有自己的局限。對於攝像頭而言,靜態物體類別多,形態千差萬別,需要大量的樣本訓練,而側翻的卡車、打开後備箱的車尾、停在路邊的養護車,都不是常見的樣本,在訓練不夠的情況下就容易識別不了。
比如著名的“白色卡車”,特斯拉曾多次與白色卡車相撞,因爲特斯拉的輔助駕駛系統沒有識別出卡車車身,而是錯將其識別爲天空,最終導致誤判。

特斯拉撞上白色卡車 來源 / 網絡
毫米波雷達的局限性也很明顯。車道上停放的汽車、金屬標牌,以及一些非標的靜止障礙物,都會因爲雷達的分辨率、回波等問題導致識別失誤。
汽車的感知系統扮演的是人眼的角色,人眼有一個特點,就是對運動物體很敏感,毫米波雷達跟人眼一樣具備這個特點,但對靜止物體比較容易“忽視”。
“這是毫米波雷達的核心技術弱點。”和高資本高級投資經理陳子穎對深途說,在她看來,毫米波雷達的角分辨率低,是行業一直想要突破的技術難點,雷達信號的分辨率會直接影響成像精度,看得清楚和看不清楚有很大的差別。
“一般來說天线越多,波束角越窄,雷達性能越強,而增加天线的方式通常是MIMO(大規模陣列)方案和多芯片級聯的方案,但前者存在信號幹擾的問題,後者存在級聯數量有限的問題,所以角分辨率始終難以突破到1以下。”她說。
來源 / 視覺中國
在技術沒有突破的情況下,對靜態物體的識別,會一直是輔助駕駛的一大痛點。
理想汽車CEO李想曾說:“目前攝像頭+毫米波雷達的組合像青蛙的眼睛,對於動態物體判斷還好,對於非標准的靜態物體幾乎無能。視覺在這個層面的進展幾乎停滯,哪怕是動態,車輛以外的識別率也低於80%。”
李想說這段話的時間是2019年,當時特斯拉Model 3直接撞上一輛正在作業的道路清掃車,車主不幸身亡。如今三年時間過去了,情況似乎也並沒有太大改觀。
技術上該如何解決?
高速路上的靜止物體,就像是自動駕駛路上的一只攔路虎,時不時跳出來嚇人。這個問題該如何解決?
劉菲鴻對深途說,問題可能不在靜止上,而是在這些較爲罕見的、低頻出現的場景,比如高速路上有側翻卡車,這種場景的出現的頻率太低了。在目前的技術框架下,瓶頸還是在罕見場景的數據量上,而不在於傳感器。
他認爲,目前的感知是基於數據驅動的,比如讓系統識別貓和狗,貓的圖片有20個,狗的圖片有2000個,那么系統對狗的識別就會好於貓的識別。所以一個場景“稀缺”,那么就是一個corner case。
特斯拉數據標注示例圖
不過目前的技術瓶頸在於,“雖然單個稀缺的場景數據量是少的,但稀缺的場景類別數卻並不少。尷尬的地方之一就在這裏。”
按照這個邏輯,要讓自動駕駛系統持續進化,就需要源源不斷“投喂”大量的數據,覆蓋盡可能多的稀缺場景,讓系統在學習中增強識別能力。
這其實是特斯拉當前的方案。特斯拉一直堅持神經網絡和機器學習,在算法上發力,而不是像國內的造車新勢力那樣堆料,增加傳感器數量。特斯拉Model 3和Model Y的傳感器配置,在相同價位車型中,屬於偏低水平,但算法彌補了傳感器的不足。
馬斯克認爲,靠純視覺方案,在數據足夠的情況下,特斯拉也可以變得跟人一樣駕駛車輛,包括識別靜止物體。
“這裏面的策略是關鍵,因此特斯拉通過每一輛車做視覺數據採集,不斷優化算法模型,會覆蓋大部分場景,但還是存在無可預估的風險。” 國內一家計算機視覺上市公司的內部人士對深途說。
風險的確是存在的,直到現在,特斯拉在靜態物體的識別上也沒有太大改進。
陳子穎認爲,多傳感器融合是更安全的方案,因爲物理層的局限很難完全突破,一旦遇到新的corner case冒出來,就又是人命關天的大事。特斯拉現在採取這樣的方案,還是更多基於傳感器的成熟度和成本角度考慮。“他們永遠只用最成熟的方案,未來隨着技術成熟和成本降低,我相信特斯拉也不會非要堅守視覺這條路徑。”
“先解決物理上的局限再談數據的局限比較可行,就像要求盲人都能靠順風耳來識路,這個難度豈不是更大。”她說。
國內車企更多走了另一條路——提升傳感器數量和性能,比如研發4D毫米波雷達,推動激光雷達量產上車。
當年的特斯拉白色貨車事故,車上用的就是傳統缺乏高度信息的毫米波雷達,所以置信度低,遠距離只能依賴圖像傳感器,最終難以擺脫物理層的局限性造成車禍。
隨着4D毫米波分辨率提高,置信度上升,識別前方有高度2米的車廂後,這個信息會立刻反饋到決策系統提前做出剎車預判,整個安全性會高很多。
激光雷達則提供了另一種可能。國內的造車新勢力在今年推出的新車型中,大部分都加入了激光雷達,比如蔚來ES7、理想L9、小鵬G9等。
“未來傳統毫米波雷達的缺陷會慢慢被4D毫米波補上,但是論精度,4D毫米波雷達始終不及激光雷達,所以毫米波雷達和激光雷達最終還是會以互相冗余補充的方式並存。”陳子穎對深途分析。
總體而言,要繞過靜態物體這個“致命殺手”,輔助駕駛還有很長的路要走。
輔助駕駛還值得信任嗎?
每一次輔助駕駛事故,都給行業敲響了警鐘。但造成嚴重後果,不完全是系統的原因,車主也難逃其咎。
在網傳聊天記錄中,小鵬P7事故中的車主說自己當時“分神了”,這是很致命的一個錯誤。
網傳小鵬P7車主聊天記錄
輔助駕駛不是自動駕駛,再怎么強調都不爲過。這項功能現在還不能解放司機的雙手,起到的只是“輔助”作用。車還得司機自己來开,遇到緊急情況要接管,出了事故司機要擔責。
去年的蔚來車禍之後,新造車行業冷靜了許多,過去那些浮誇、不負責任的宣傳變少了,風險提示加強了。
比如新用戶要开啓小鵬的輔助駕駛系統,必須經過考試,在考題中就有提到,如果遇到低速或靜止的清掃車、橫停的事故車,系統有可能無法識別,應立即接管車輛。特斯拉、蔚來等車企也在用戶手冊中提醒,車輛前方的靜止車輛或障礙物,系統可能無法識別和剎停。
但這些考試或提示,究竟對車主起到了多大的警示作用,很難評估。
在網上,經常會有一些車輛开着輔助駕駛高速飛馳的視頻,車主拿着手機在發消息或玩遊戲,還有人甚至坐在後排,完全讓車自己开。這些人或許是出於炫耀,亦或是出於獵奇,但暴露的是僥幸心理。
這種僥幸心理的形成,建立在日常使用中建立的信任之上。或許車主在平時开啓輔助駕駛功能時,系統都有優異表現,甚至超出車主預期,但這並不代表系統就具備了應對所有極端場景的能力。而那些罕見的corner case,往往是在不經意間出現的,而且致命。
“人工智能可以識別80%、90%,哪怕是99.999%,但達不到100%。但往往出事就是那0.00X%的不能識別造成的。這是AI的局限性。”一家自動駕駛公司內部人士對深途說。
深途接觸過多位Robotaxi安全員,他們坐在號稱具備L4級無人駕駛能力的Robotaxi上,讓車輛在測試運營路段自動駕駛,但隨時做好接管准備。多位安全員表示,這個過程比自己开車還要累,因爲需要注意力高度集中。“方向盤不在你手裏,你不知道什么時候就突然要接管,絲毫大意不得。”
羅馬不是一天建成的,自動駕駛要真正大規模應用,無論是在技術還是法規上,都還有很多要突破的障礙。對於車主而言,這需要時間、耐心,更需要風險意識。
無論車企再怎么宣傳,車主都需要時刻牢記,現在的自動駕駛都是L2向L3無限逼近的階段,還不能完全依賴傳感器去做決策。
陳子穎認爲,人作爲主要駕駛責任人這個前提一定要明確,“否則就是拿自己或他人的生命當自動駕駛發展中的墊腳石,代價真的太大了。”(來源:深途)
本文作者可以追加內容哦 !
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播信息之目的,不構成任何投資建議,如有侵權行為,請第一時間聯絡我們修改或刪除,多謝。
標題:小鵬汽車撞人,輔助駕駛還敢用嗎?
地址:https://www.breakthing.com/post/13418.html