



特斯拉 FSD正式版V12即將問世,FSD與Optimus底層模塊打通,感知+決策+控制三個維度有望助力人形機器人商業化加速
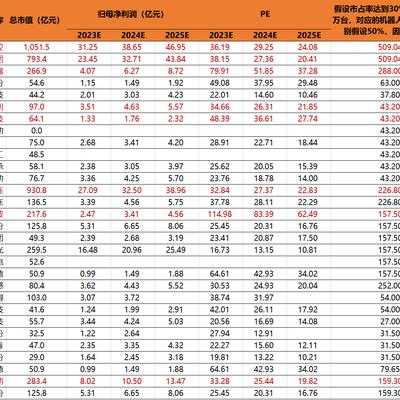
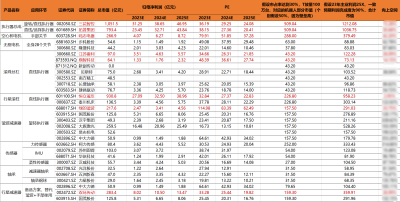
人形機器人標的梳理
紅色標的爲進入特斯拉供應鏈概率較高品種
(一)FSD的V12正式版即將問世,或將加快進入中國市場,海量數據 (20.30, 0.48, 2.42%)加速FSD迭代演進。
FSD正式版有望發布:2021年,FSD測試有2000客戶參加。2022年年底特斯拉FSD已向所有北美用戶开放。2022年擴展到了16萬客戶。特斯拉目前積累了480萬段數據,訓練了7.5萬個神經網絡,並在此基礎上推出了35個FSD的版本更新。2023年6月底,馬斯克在社媒表示FSD的V12版本將不再是測試版"Version 12 won't be Beta"。特斯拉FSD有望展現出更加完善的產品形態,向更廣泛的用戶群體开放。
FSD有望入華:隨着6月馬斯克訪華,不斷有消息傳出,特斯拉FSD完全版將加快進入中國。一方面,上海市經信委官方早前表示,將進一步深化和特斯拉的合作,推動自動駕駛、機器人等功能板塊在滬布局。隨後馬斯克訪華期間會見了商務部、工信部等多部門主管,就智能網聯汽車發展交換了意見。百度 (148.260, -1.670, -1.11%)智能汽車事業部總經理儲瑞松認爲,特斯拉 FSD 可能會在2024年入華,之後需要1~1.5年的時間去磨合中國道路場景。(資料來源:蓋世汽車)
FSD滲透率:根據特斯拉披露,2020-2022年年底,北美用戶數量分別爲16、28.5、40萬人,若除以特斯拉在北美的累計交付量,則可以計算出2020-2022年存量市場上特斯拉FSD的滲透率分別爲26%、30%、26%。(資料來源:Troy Teslike,特斯拉股東大會)
FSD付費情況:北美市場FSD幾經漲價,2019年最初價格爲5000美元,2022年初提升至12000美元,22年9月5日再次上漲至15000美元。
表:特斯拉FSD迭代發展史(資料來源:Autopilotreview)

圖:馬斯克推特表示V12將不再是測試版
(二)硬件+算法+算力全面推進,FSD持續迭代進化
1)硬件端:HW1.0 逐漸迭代至HW4.0,攝像頭接口豐富至12個
HW1.0–基於Mobileye芯片的第一代駕駛輔助硬件,HW1.0階段特斯拉的主要工作是多傳感器融合+應用層軟件开發。
HW2.0–特斯拉設計的第二代駕駛輔助硬件,這個階段特斯拉掌握圖像識別算法+多傳感器融合+應用層軟件开發。
HW2.5–這是對HW2.0的一個小版本更新,主要用於冗余和略微提高的可靠性。此版本還新增兩個功能:行車記錄儀和帶有本地保存視頻的哨兵模式。還有一個變化點是毫米波雷達的供應商從博世變成大陸,大陸的毫米波雷達也不遜色於博世。早期的model 3和modelY駕駛輔助ECU硬件類似於HW2.5,但使用的是汽車冷卻液回路中的水冷而不是散熱風扇。
HW3.0–特斯拉駕駛輔助硬件的重大革新,首次採用自研的自動駕駛芯片,拋棄英飛凌/英偉達 (446.800, 1.650, 0.37%)的產品,自研高度集成的SoC+MCU芯片,具備全套芯片設計+圖像識別算法+多傳感器融合+應用層軟件开發。
HW4.0–芯片依然基於三星的 Exynos 架構,但是CPU 核心從之前的12個增加到20個,最高頻率爲2.35GHz,神經網絡加速器由雙核升級爲三核,最大頻率從HW3.0的2 GHz提升到2.2 GHz,預估算力爲300-500 TOPS。並且HW4.0配有12個攝像頭接口,其中7個用於AutoPilot(自動駕駛系統),且配備了特斯拉定制的Phoenix 4D毫米波雷達和雷達加熱器。
表:特斯拉硬件迭代配置(資料來源:焉知汽車)
2)算法端:BEV+Transformer,自動駕駛進入大模型時代,引入佔用網絡算法持續升級
2016-2018:特斯拉延用了業內常規的骨幹網結構;使用 2D 檢測器進行特徵提取;以人工對數據進行標注。整體來看,這一套自動駕駛算法還比較原始,相對傳統。在這一時期,特斯拉自動駕駛算法仍處於技術追趕階段。
2018-2019:在這次算法革新中,特斯拉構建了多任務學習神經網絡架構 HydraNet,並使用了特徵提取網絡 BiFPN。相較於此前算法,HydraNet 能夠減少重復的卷積計算,減少主幹網絡計算數量,還能夠將特定任務從主幹中解耦出來,進行單獨微調。
2020:BEV+Transformer,自動駕駛進入大模型時代。在這一方式中,特斯拉先在 BEV 空間層中初始化特徵,再通過多層的 Transformer 和 2D 圖像特徵進行交互融合,最終得到 BEV 特徵,也就是先 3D 再 2D,反向开發,實現 BEV的轉換。Transformer是一種基於注意力機制(Attention)的神經網絡模型。Transformer 的引入,使得BEV 視角在自動駕駛領域得以實現。而 3D 空間的引入,使得自動駕駛的思維方式,更接近於真實世界。
2021-2022:特斯拉感知網絡架構引入了時空序列特徵層,特斯拉對 BEV 進行了升級——引入佔用網絡。這使得特斯拉自動駕駛算法的泛化能力得到了提升。而借助於算法提升,特斯拉 FSD 更能刻畫真實的物理世界,進而才有可能實現端到端模型。
圖:特斯拉自動駕駛算法迭代歷程(資料來源:汽車之心)
3)算力端:Dojo超級計算機已投入生產,預計24年有望成爲全球最先進5台計算機之一
Dojo的產品進展時間线:2020年,馬斯克決定幹脆自主設計一個芯片,自行开發超算;2023年7月特斯拉的 Dojo 正式投產,隨後,特斯拉的算力將進入快速增長期。2024年2月特斯拉的算力規模將進入全球前五,2024年10月特斯拉的算力總規模將達到 100 Exa-Flops ,相當於30萬塊英偉達A100顯卡的算力總和。
圖:特斯拉Dojo超級計算機的算力規劃
性價比優於GPU:D1是一種面向AI的新型CPU,具有354內核,運行頻率爲2GHz。據設計師介紹,D1自研架構基於RISC-V架構ISA,從RISC-V借鑑了一些指令,專門針對運行機器學習和神經網絡訓練進行了優化,採用7nm制程工藝,具備超過500億個晶體管,形成了354個核心,支持多種浮點格式,包括FP32、BFP16和一種新的格式CFP8或可配置的FP8,其32位浮點運算的最大性能是22.6T-FLOPs,對於16位浮點計算,D1的最大性能躍升至362T-FLOPs。D1每個核心都具有完整的帶矩陣計算能力,其計算靈活性是遠超衆核架構的GPU。D1芯片面積爲645平方毫米,小於英偉達的A100(826平方毫米)和AMDArcturus(750平方毫米)。據特斯拉芯片團隊稱,同成本下性能提升4倍,同能耗下性能提高1.3倍,佔用空間節省5倍。Dojo算力無上限。
架構改進:從特斯拉公布的產品進度线來看,Dojo這台超級計算機的算力不是一蹴而就,而是逐年累加,隨着時間线拉長,算力可能爆棚,這也是特斯拉Dojo的創新之處。這裏的算力源於超算,不是那種勉強拼湊起來的雲計算。原因在於Dojo採用了分布式架構,可以隨意地增加算力。這與我們熟悉的五百強超算系統不同,Dojo是一套完全可定制架構,全面涵蓋計算、網絡、輸入/輸出(I/O)芯片,乃至指令集架構(ISA)、供電、封裝和冷卻。據特斯拉介紹,用D1擴展算力的方式就好像自家地面鋪瓷磚一樣。特斯拉將25個D1芯片按5×5規格組成一個訓練模塊,這被稱爲tile(瓷磚),再將120個訓練模塊組成一個Dojo ExaPod。換言之,每個Dojo ExaPod內置3000個D1芯片,擁有超過100萬個核心,總算力達到1.1E-FLOPS(每秒百億億次浮點運算)。由於Dojo是大型分布式系統,從理論上來說,Dojo的性能拓展可以無限擴張,沒有上限。
圖:同樣跑經典圖像分類模型ResNet-50,Dojo可以實現比英偉達A100更高的幀率
圖:跑自動標注算法、預測汽車周圍所有物體空間佔用率的神經網絡模型Occupancy Netwo (10.320, 0.000, 0.00%)rks時,相比英偉達A100,Dojo能實現性能的倍增
(三)FSD與人形機器人底層模塊已經打通,實現算法復用,在機器人感知+決策+控制層面起到關鍵作用
5月17日的特斯拉股東日,馬斯克表示,特斯拉已經打通了FSD和機器人的底層模塊,實現了一定程度的算法復用。馬斯克同時預計,隨着人形機器人Tesla Bot的出現,FSD技術在通用人工智能(AGI)領域將產生巨大影響,特斯拉FSD將在兩年內迎來自己的‘ChatGPT時刻’。
FSD算法主要依賴於神經網絡和計算機視覺技術,對機器人的感知、決策和控制起到重要作用,自動駕駛與人形機器人業務有望產生強協同效應。
1)感知層面:FSD的核心是神經網絡模型:通過對實時傳感器(如相機、激光雷達等)獲取的數據進行處理和分析,並從中提取有關道路、車輛、行人和障礙物等信息,可以實現車輛的環境感知和物體識別。特斯拉的一個重要技術是Occupancy Network (佔據網絡),用於對3D空間中一些長尾障礙物的檢測,來估測障礙物的位置大小,甚至可以估計物體的運動情況。FSD算法利用傳感器數據進行環境感知,這些傳感器也可以幫助機器人感知周圍環境,識別物體、人和障礙物等。
2)決策層面:FSD算法在處理傳感器數據時,具備對道路、車輛和行人等物體進行識別的能力,可以幫助機器人在執行任務時識別和定位物體。在自動駕駛中,FSD算法可以根據感知到的環境信息進行路徑規劃和決策。類似地,這種路徑規劃和決策的方法也可以應用於機器人,幫助機器人在復雜的環境中選擇最佳路徑和執行適當的決策。
3)控制層面:在去年Tesla AI Day上,特斯拉就公布了一種在线矢量地圖構建模型Lanes Network,可以得到車道线的拓撲結構,幫助自動駕駛汽車實現變道。在人形機器領域需要對FSD算法進行適應和改進,以滿足機器人特定的需求和任務。
圖:Occupancy Network 佔據網絡示意圖,FSD算法利用傳感器數據進行環境感知(資料來源:特斯拉AI Day)
本文作者可以追加內容哦 !
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播信息之目的,不構成任何投資建議,如有侵權行為,請第一時間聯絡我們修改或刪除,多謝。
標題:人形機器人專題:特斯拉FSD V12即將問世,與Optimus底層打通
地址:https://www.breakthing.com/post/86464.html