




2022年8月11日,小米的雷軍發布了CyberOne(鐵大)全尺寸人形機器人,而2022年9月,馬斯克就將發布特斯拉人形機器人擎天柱(Optimus),這兩個產品讓略顯沉寂的人形機器人市場掀起不小的波瀾。

小米人形機器人鐵大(CyberOne)2022年8月11發布
雷軍和馬斯克,其實是人形機器人市場的後來者,在他們前面有兩個著名的人形機器人公司:日本本田的阿西莫ASIMO、美國波士頓動力的ATLAS,這兩個公司在人形機器人領域已經耕耘了30年,但是卻不約而同的遇到了中年危機,阿西莫2022年3月宣布落幕,而波士頓動力已經先後三次被谷歌、軟硬、現代等不同的公司买下。是擺脫不了“長江後浪推前浪,前浪死在沙灘上”的宿命嗎?南瓜君簡單說一下結論:人形機器人市場在過去的30年裏,一直是一個不斷投入而沒有產出的行業,沒有商業利益的回報,即便是谷歌這樣的公司也耗不起。

特斯拉人形機器人擎天柱(Optimus)預計2022年9月發布
馬斯克的特斯拉是何許人也?他是目前的世界首富,2022年1月的財富超過3000億美元(近2萬億人民幣),旗下有特斯拉、Space X太空探索技術公司、Star Link星鏈等公司,每一個公司都是行業翹楚。
反觀小米,憑借一部手機,闖進了世界500強,創始人雷軍2022年,以117億美元財富位列《2022年福布斯全球億萬富豪榜》第163位。所以我們要爲小米闖入人形機器人這個賠錢的賽道喝彩,相信小米也是看到了人形機器人背後的技術價值,通過它孵化出來的技術,將爲小米汽車等產品注入澎湃的動力。
扯遠了,話說回到今天的主角:波士頓動力(Boston Dynamics)。
一、波士頓動力發展簡史
作爲一家已經發展了30年的公司,在它的發展道路上有太多值得書寫的事件,我們簡單梳理一下:
波士頓動力公司由馬克雷伯特在1992年在美國麻省理工學院創立。

波士頓動力公司創始人:馬克雷伯特(Marc Raibert)
波士頓動力初期的發展得益於美國軍方的資助,公司的著名產品波士頓機械狗是由美國國防高等研究計劃署(DARPA)出資,替美國軍方开發的四足機器人。
在2013年12月13日,波士頓動力公司被Google收購。
2017年6月9日,軟銀以不公开的條款收購Google母公司Alphabet旗下的波士頓動力公司。
2020年12月12日,現代集團宣布以11億美元收購波士頓動力,不過收購完成後軟銀將繼續通過附屬公司持有波士頓動力20%的股份。
2021年6月,現代宣布正式從軟銀手中收購波士頓動力公司的控股權。
2022年8月15日,韓國汽車公司現代汽車(Hyundai)與其旗下的機器人公司波士頓動力(Boston Dynamics)宣布將在馬薩諸塞州劍橋市(Cambridge, Mass)共同成立BDAII(Boston Dynamics AI Institute,波士頓動力人工智能研究所),其目標是“引領人工智能和機器人技術的進步”。現代汽車與波士頓動力將共同爲這個項目提供超過4億美元的啓動資金。波士頓動力的創始人馬克雷伯特(Marc Raibert)是整個項目的負責人,波士頓動力的首席科學家阿爾裏茲(Al Rizzi)將擔任首席技術官。
波士頓動力七年換了三任東家,其主要原因就是該公司的機器人遲遲未能實現商業化。研究專家稱,波士頓動力公司似乎一直在嘗試兩條不同的道路。一條是圍繞Spot和Stretch這類機器人的商業道路,另一條則是獨立的完全專注於Atlas的技術研究道路。
二、波士頓動力機器人發展史
早期的(1980~1995)波士頓動力公司的創始人馬克雷伯特聯合卡內基梅隆大學、麻省理工學院做了基礎性技術研究,並开發了一些單足、兩足和四足機器人。

波士頓動力早期機器人

波士頓動力早期機器人

波士頓動力早期機器人
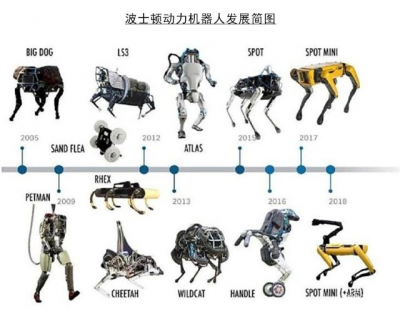
波士頓動力機器人發展簡史圖
波士頓動力四足機器人
人們初次被波士頓動力驚豔,始於2008年發布的BIGDOG大狗“被虐”視頻,話不多說,看圖:

2008年 波士頓動力BIGDOG大狗穩定性測試

穩定性測試,動作粗魯看着不爽
機械狗項目是由美國國防發展研究項目局出資資助。希望研制一種能夠負重的機械騾,能夠和士兵一起在傳統機械車輛無法行駛的粗糙地形上協同作战。
它沒有車輪或者履帶,而是採用四條機械腿來運動。機械腿上面有各種傳感器,包括關節位置和接觸地面的部位。它還有一個激光回轉儀,以及一套立體視覺系統。
機械狗有一米長,0.7米高,75千克重,幾乎相當於一頭小騾子的體積。能夠以每小時5.3公裏的速度穿越粗糙地形,並且負載154千克的重量。它能夠爬行35度的斜坡。

2012年 四足機器人LS3
LS3是波士頓繼大狗之後,在2012年推出的一款新型四足機器人,主要是幫士兵運送物品,燃料足夠的情況下能徒步32公裏,能自動循跡跟隨士兵,並且可以全自主導航到設置目的地,基於GPS信號定位並可實時避开障礙物。相比大狗,LS3體型更爲龐大,負載能力更強,移動速度也快,實用性也有大幅提升。
在實战測試中,大狗因爲極大的噪音(燃油發動機)和有限的使用時間等無法克服的現實問題,最終沒有採購。

在阿富汗战場使用驢子運輸物資
在阿富汗战場使用驢子運輸物資
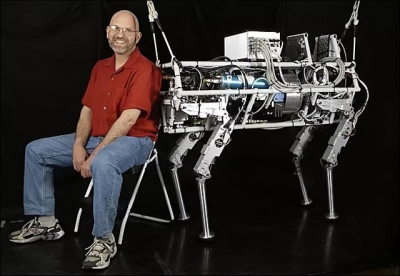
波士頓動力初代BIGDOG大狗
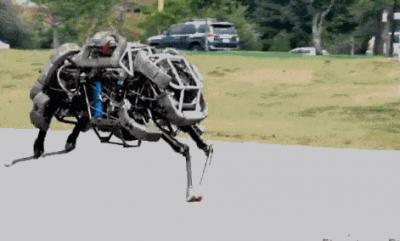
Wild Cat野貓機器人 2013年 前身是Cheetah獵豹機器人
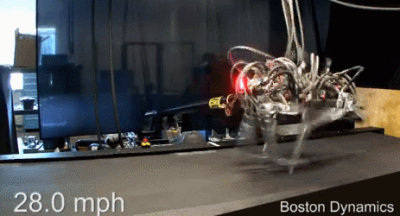
獵豹機器人 28英裏/小時(合48公裏/小時)
渾身插滿電纜的獵豹機器人在實驗室可以達到48公裏/小時的速度,而野貓機器人也完全繼承了速度這一點,它在戶外可以達到32公裏/小時,並且擁有多種運動姿態,包括小跑、跳躍、快跑,平衡度非常高,宣稱是世界上運動速度最快的四足機器人。

2015年 四足機器人SPOT
Spot是波士頓動力公司在 2015年推出的一款四足機器人,其高度約爲 0.94 米,重量約爲 75 公斤,可背負 45 公斤的有效負載進行自由行動或奔跑,並且不管是抓取能力還是爬坡能力都很優秀,同時是波士頓機器人中最靜音的一款。
Spot Mini 這個穩定器咋樣
Spot Mini 你瞅我看啥?我瞅你咋滴!
Spot Mini 尬舞
Spot Mini 拉車
SpotMini在2017年推出,其重量僅爲25kg,是波士頓四足家族中最爲靈活的機器人,同時跟Spot的靜音程度上不相上下,mini擁有一副加裝機械爪,可以利用其开門,上下樓也非常輕松,還能“拉車”,辦公室、戶外和家庭都可以運作,目前已被用於商用。
2、波士頓動力雙足人形機器人
2009年波士頓動力推出PETMAN人形機器人,這個站在機器人研究金字塔尖的神奇“物種”一路飛速進化,剛出場時其形象還人不人鬼不鬼,在滾動履帶上甩着兩條扭曲的大長腿,隨後不僅外觀越來越炫酷,而且新技能不斷刷新人類認知。
2009年初代PETMAN
2009年初代PETMAN
早在2009年的時候波士頓動力雙足人形機器人原型機Petman亮相,這時只有兩條腿,需要拖着電纜在履帶上晃晃悠悠地行走,它的“受虐之路”也正是由此开始。
2013年初代Atlas原型機
2013年,初具人類外形的Atlas原型機亮相,這時的Atlas已經能夠在碎石堆上行走,受到的“虐待”也變得更殘酷,它不僅要“金雞獨立”,還要承受大擺球的撞擊。
這段視頻發布兩個月後,波士頓動力被谷歌收購。在人工智能領域,谷歌收購了大量的創新創業企業,其中DeepMind和波士頓動力備受業界關注,因是AlphaGo(阿爾法狗)橫掃圍棋界,該人工智能系統的締造者正是DeepMind。此項收購完成後,谷歌隨後即終止了波士頓動力的軍事合同,同時這次收購也使谷歌开始涉足機器人產品領域。
2016年Atlas面世
Atlas“百虐成剛”
Atlas雪地行走
Atlas雪地行走
時間到了2016年,也就是波士頓動力被谷歌收購後的第三年,我們所熟悉的那個Atlas終於正式亮相。它的外觀已與現在會跑酷、會跳舞的Atlas無異。但這時的Atlas仍是個“嬰兒”,尚在蹣跚學步階段,走路踉踉蹌蹌,動作也不連貫,像極了一個半夜裏走在回家路上的醉漢。
下面的幾個動態圖片,將給你展示Atlas的驚人能力:
Atlas測試:根據二維碼追蹤物體
Atlas測試:後空翻
Atlas測試:當然,不是每一次都成功
Atlas跳過障礙,連續登上台階
Atlas測試:管子漏了
Atlas這段跑酷怎么樣
Atlas戶外測試:跳過障礙
Atlas測試:戶外奔跑
2020年,學會了新技能:跳舞
看完了Atlas的這幾條條視頻,可能會感覺Atlas在六年的時間裏面進步沒那么明顯。比如,在2017年的時候Atlas就能夠在台階之間跳躍,還能進行後空翻。一年後,它又學會了一邊跑步一邊躍上幾層台階。在這樣的成長軌跡下,Atlas學會“跑酷”似乎也是理所應當的。然而,Atlas實現這一系列動作背後的基本過程已經發生了巨大的改變。

Atlas和它的兄弟們
最初的Atlas由人進行遙控,控制它的行走方向。如果想要它完成某項挑战(比如跑酷或跳舞等),需要提前對各種動作進行動態捕捉,然後將捕捉到的動作連成可執行的程序。這時的Atlas只是機械的完成相應的任務,而並沒有與環境產生互動。
Atlas行動路徑規劃
在Atlas最近的這次跑酷中,研究團隊已不需要提前對它的行動進行規劃。在跑酷之前,研究團隊爲Atlas提供了一張高級地圖,其中大致描述了它的行動路线和相應位置應該做出的動作。跑酷過程中Atlas利用這些信息來爲自己導航,並且它可以對環境進行感知,根據實時感知到的數據自主規劃整個行動以完成挑战。
Atlas行動路徑規劃
Atlas執行的每個動作都源自其行爲庫中的動作模板,它可以根據目標情況自主從庫中選擇相應的動作執行。跑酷過程中,Atlas的模型預測控制器(MPC)會調整其發力、姿勢、動作發生時機等細節,來應對環境、腳滑等各種可能實時出現的因素。這意味着研究人員不必爲Atlas的行動逐個調整細節,它的控制器就可以做到。
Atlas行動路徑規劃
並且,MPC還允許Atlas跨行爲邊界預測下一步的行動,比如它知道了這次跳躍後是一個後空翻後,就可以自動地創建從一個行爲到下一個行爲的過渡,使每一步動作都自然的連貫起來。
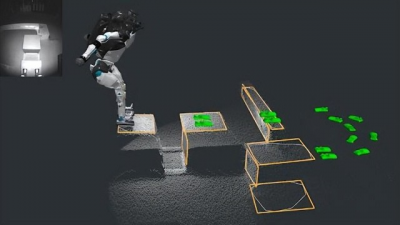
Atlas搭載的TOF深度相機生成的點雲圖
現在,Atlas可以利用頭部的RGB攝像頭和TOF深度傳感器獲取更加全面的環境信息。TOF深度傳感器以每秒15幀的速度生成環境的點雲(point clouds)。點雲是大量測距結果的集合,Atlas獲取到環境的點雲後,它的感知軟件會利用一種稱作多平面分割(multi-plane segmentation)的算法從中提取平面,並輸入到一個映射系統中,構建出Atlas看到的不同對象的模型。
這就相當於爲Atlas構建了一張3D地圖,Atlas跑酷過程中正是基於它構建的這個模型來規劃路徑,計算每一步的落腳點。
Atlas計算機路徑規劃
三、波士頓動力的團隊
1、波士頓動力創始人,機器狗之父—馬克雷伯特(Marc Raibert)

馬克雷伯特(Marc Raibert)
“我愛機器人,我的長期目標是讓機器人像動物和人一樣運動自如。而在我看來,這需要全面的开發設計,包括硬件、軟件以及運動行爲,只有三者達到協調,才是一款我心目中的機器人。”

馬克雷伯特在TED上演講並展示spot mini機器狗
2017年,馬克雷伯特帶着機器狗登上TED舞台。這是雷伯特爲數不多的露面,此前,他更喜歡藏在波士頓動力動輒點擊量數百萬的視頻後面。比起商人,他像一個潛心學術的學者。年輕時埋首機器人研究,再擡頭時一輩子居然就那么過去了。
30年前,波士頓動力成立;13年前,上傳了第一條機器人視頻;12年前,雷伯特才开始出現在報刊媒體的報道中;3年前,才开始商業化轉型賣產品;2020,spot mini機器狗才开始接到訂單,此時的雷伯特已經70歲了。
馬克雷伯特和雙足人形機器人Atlas
2022年8月15日,韓國現代汽車(Hyundai)與他收購的波士頓動力宣布共同成立BDAII(Boston Dynamics AI Institute,波士頓動力人工智能研究所),波士頓動力的創始人馬克雷伯特(Marc Raibert)是整個項目的負責人。

馬克雷伯特(Marc Raibert)和Spot mini
BDAII將是獨立於波士頓動力公司的一個研究所,可以自由地專注於具有前瞻性的研究道路,而不用憂心機器人長久以來難以商業化的問題。雖然這些研究目前沒有直接體現出商業價值,但是它們極具商業潛力,從某個角度而言,這些研究衍生出的技術將在未來產生巨大的價值。
該研究所的四個核心技術工作領域爲:認知AI(cognitive AI)、體育AI(athletic AI)、有機硬件設計(organic hardware design)、機器人道德和政策(ethics and policy)。
2、雙足機器人Atlas團隊
Atlas團隊負責人Scott Kuindersma稱Atlas是波士頓動力在液壓驅動的人形機器人領域十多年來工作的結晶,爲該團隊提供了一個研究平台。而Atlas團隊的工作便是讓這個平台不斷地突破極限,來做他們能想象的到的最瘋狂、最激動人心的事情。

Atlas團隊負責人Scott Kuindersma
與其他的任何項目或試驗一樣,Atlas從步履蹣跚的走路,到學會跑酷都是團隊合作的成果。目前,Atlas團隊共有4個小團隊,分別是軟件團隊、硬件團隊、技術團隊和運營團隊。

Atlas團隊在錄制雙足機器人“跑酷”視頻
對於波士頓動力的各個團隊而言,其發布的每條視頻都是他們在過去幾個月或一年所做的工作的總結,代表着他們過去這段時間內的工作到達了一個新的頂點。因此,每當有視頻要拍攝的時候都是全員參與。
爲了讓視頻效果更好,他們准備了四台Atlas機器人,其中兩個作爲“演示機器人”,外觀要盡量保持幹淨整潔,另外兩個作爲“試驗機器人”,用於开發和測試新行爲,承擔了大部分的跌落,以至於全身傷痕累累。

用於測試新行爲的Atlas機器人
結語
波士頓動力公司於1992年成立,第一收購是在2013年被谷歌收購。四年後,2017年谷歌將波士頓動力公司出售給了軟銀集團。在軟銀旗下,波士頓動力的四足機器人Spot上市,相關的Spot Explorer套件爲軟銀創造了超過3000萬美元的收入。2020年,軟銀又將波士頓動力公司出售給了現代汽車公司。
波士頓動力七年換了三任東家,其主要原因就是該公司的機器人遲遲未能實現商業化。波士頓動力公司創始人雷伯特的“至理名言”是:“沒經歷至少25年潛心研究的機器人產品,不足以商業化。”
研究機器人,對時間,不敏感。波士頓動力花了30年打磨出震驚世界的機器狗Spot、人形機器人Atlas,給未來的智能機器人开了個好頭。希望後來者小米們、特斯拉們能將這個產業發揚光大!
本文作者可以追加內容哦 !
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播信息之目的,不構成任何投資建議,如有侵權行為,請第一時間聯絡我們修改或刪除,多謝。
標題:【轉帖】人形機器人老大哥-波士頓動力:你們才开始走路,我已經到處跑酷
地址:https://www.breakthing.com/post/14503.html