




近日,在歐洲計算機視覺國際會議(European Conference on Computer Vision, ECCV)2022自動駕駛多目標跟蹤挑战賽上,憑借業界領先的技術實力,聯想集團研究院自動駕駛算法團隊一舉包攬了該領域全部四個競賽的冠軍。
 這四個競賽包括BDD100K多目標跟蹤任務 (MOT, Multiple Object Tracking),多目標跟蹤和分割任務(MOTS,Multiple Object Tracking and Segmentation),基於自監督學習的多目標跟蹤任務(SSMOT,Self-supervised MOT),以及基於自監督學習的多目標跟蹤和分割任務(SSMOTS,Self-supervised MOTS)。 歐洲計算機視覺國際會議(ECCV)與國際計算機視覺大會(ICCV)、計算機視覺和模式識別國際會議(CVPR)一起構成了國際計算機視覺的三大頂會。6月,在CVPR2022會議上舉辦的BDD100K多目標跟蹤挑战賽上,聯想研究院一舉擊敗20多個國內外頂尖團隊,奪得MOT冠軍。至此,聯想研究院已拿下該領域今年6項冠軍中的5項。
這四個競賽包括BDD100K多目標跟蹤任務 (MOT, Multiple Object Tracking),多目標跟蹤和分割任務(MOTS,Multiple Object Tracking and Segmentation),基於自監督學習的多目標跟蹤任務(SSMOT,Self-supervised MOT),以及基於自監督學習的多目標跟蹤和分割任務(SSMOTS,Self-supervised MOTS)。 歐洲計算機視覺國際會議(ECCV)與國際計算機視覺大會(ICCV)、計算機視覺和模式識別國際會議(CVPR)一起構成了國際計算機視覺的三大頂會。6月,在CVPR2022會議上舉辦的BDD100K多目標跟蹤挑战賽上,聯想研究院一舉擊敗20多個國內外頂尖團隊,奪得MOT冠軍。至此,聯想研究院已拿下該領域今年6項冠軍中的5項。




針對這一特點,在今年ECCV自動駕駛論壇舉辦的BDD100K多目標跟蹤挑战賽中,聯想研究院的創新方案,ReIDTrack以多級檢測網絡CBNetV2作爲檢測基准方法,結合ByteTrack跟蹤方法對檢測結果進行時域關聯。同時,ReIDTrack僅使用外觀特徵來關聯對象,簡單有效,可以在低幀速率下取得良好效果。 
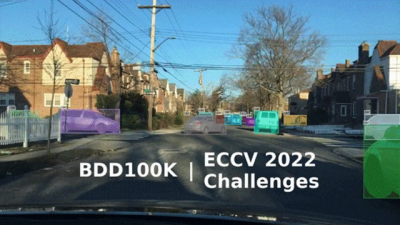
 BDD100K MOT/MOTS數據集示例 此次挑战賽,除了常規MOT與MOTS競賽,還增加了基於自監督學習的多目標跟蹤比賽。該競賽不提供跟蹤標籤,因此外觀模型不能再使用傳統的有監督學習方法進行訓練。聯想研究院自動駕駛算法團隊通過對比學習的方法,在不使用跟蹤標籤情況下,訓練了新的外觀特徵模型,不但滿足了自監督學習的需求,而且提高了多目標跟蹤的成績。同時,引入在時間維度上的檢測置信度權重來進行外觀特徵更新,增強了跟蹤軌跡的抗幹擾能力。 此外,聯想研究團隊爲ReIDTrack框架添加了分割網絡,使其支持多目標跟蹤和分割任務(MOTS)。該方法採用兩階段訓練的策略,首先使用大量的檢測框標籤數據進行MOT訓練,然後將訓練好的網絡針對少量的分割標注數據進行微調,微調後的網絡能更好地處理MOTS任務。
BDD100K MOT/MOTS數據集示例 此次挑战賽,除了常規MOT與MOTS競賽,還增加了基於自監督學習的多目標跟蹤比賽。該競賽不提供跟蹤標籤,因此外觀模型不能再使用傳統的有監督學習方法進行訓練。聯想研究院自動駕駛算法團隊通過對比學習的方法,在不使用跟蹤標籤情況下,訓練了新的外觀特徵模型,不但滿足了自監督學習的需求,而且提高了多目標跟蹤的成績。同時,引入在時間維度上的檢測置信度權重來進行外觀特徵更新,增強了跟蹤軌跡的抗幹擾能力。 此外,聯想研究團隊爲ReIDTrack框架添加了分割網絡,使其支持多目標跟蹤和分割任務(MOTS)。該方法採用兩階段訓練的策略,首先使用大量的檢測框標籤數據進行MOT訓練,然後將訓練好的網絡針對少量的分割標注數據進行微調,微調後的網絡能更好地處理MOTS任務。
多目標跟蹤技術的應用
多目標跟蹤是計算機視覺領域的關鍵技術之一,在自動駕駛、智能監控、行爲識別等領域應用非常廣泛。在事先不了解目標數量的情況下,通過該技術,能夠對視頻中的行人、汽車、動物等多個目標進行檢測並賦予ID進行軌跡跟蹤。不同的目標擁有不同的ID,從而實現後續的軌跡預測、精准查找等工作。 在車計算領域,高效的多目標跟蹤是實現高階自動駕駛的關鍵技術之一。有了它,自動駕駛的車輛能夠對路面的其他車輛和行人進行檢測跟蹤,基於它們的運動軌跡對接下來的車輛駕駛和行人行爲進行預測,並據此規劃自己的行駛軌跡,從而實現安全駕駛,減少碰撞事故的發生。 自動駕駛場景下的多目標跟蹤技術是聯想研究院技術研發的重點領域之一。多目標跟蹤與分割任務是自動駕駛視覺感知的一項重要算法,具有廣泛的應用價值。爲了促進未來自動駕駛系統的發展,多目標跟蹤與分割所需的視覺識別模型應該具備自我探索、自我訓練和自我適應的能力,能夠應對各種新出現的地理環境、街道、城市、天氣狀況、物體標籤、視角或異常場景。爲此,聯想研究院自動駕駛算法團隊在自監督學習、大規模預訓練、弱監督學習和增量/持續學習方面做出了許多努力,以持續改善視覺感知系統,使其脫離傳統的監督學習的路徑,助力打造更好的自動駕駛解決方案。 
此前,聯想集團已經宣布進軍車計算領域,致力於通過智能座艙、自動駕駛算法等技術,助力汽車行業的智能化發展。此次包攬ECCV自動駕駛多目標跟蹤挑战賽四項冠軍,有力地展示了聯想在車計算領域的技術實力。 想要了解聯想車計算的最新進展,敬請關注即將於11月9日舉辦的聯想創新科技大會主論壇以及車計算分論壇!

點“在看”,想未來
本文作者可以追加內容哦 !
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播信息之目的,不構成任何投資建議,如有侵權行為,請第一時間聯絡我們修改或刪除,多謝。
標題:聯想集團在自動駕駛領域一舉奪下4個冠軍!
地址:https://www.breakthing.com/post/25971.html