
特斯拉FSD V11.3將使用神經網絡進行車輛導航和控制
1年前



特斯拉FSD V11.3將使用神經網絡進行車輛導航和控制
據外媒報道,特斯拉首席執行官埃隆馬斯克近日在推特上表示,特斯拉FSD V11.3將具有衆多改進,從而在公开發布前具有更高穩定性。

此外,北美以外的特斯拉用戶甚至沒有機會測試Beta軟件,即使在爲FSD功能付費。據說特斯拉將在歐洲測試該軟件,但並未公布具體日期。考慮到近期的特斯拉降價問題,不少FSD付費用戶表示可能會換車。但由於FSD軟件與車輛綁定,出售汽車或發生碰撞都會導致財產損失。
馬斯克在推特上稱,該FSD V11.3最快將在本周內添加衆多小改進,並最遲於下周發布。
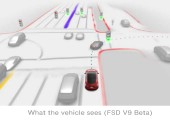
更重要是,特斯拉將开始使用神經網絡進行車輛導航和控制,而不僅僅是視覺。目前,特斯拉使用神經網絡繪制車輛周圍環境的地圖,並計算出汽車周圍的物體及其預計軌跡。但繪制圍繞物體的軌跡並控制車輛仍然採用的是傳統方式進行編碼。馬斯克透露的信息雖然不多,但他暗示特斯拉將使用機器學習技術來確定車輛在各種情況下的最佳行動方案。
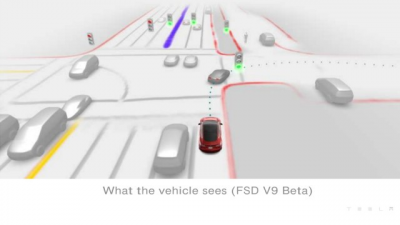
沒有地圖數據和GPS的導航將允許FSD Beta找到進入地下停車場的路徑。類似於飛機使用慣性測量自我定位,特斯拉可以使用最後已知的位置、指南針、車輪運動和速度來確定其在任何給定時間的位置。
追加內容
本文作者可以追加內容哦 !
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播信息之目的,不構成任何投資建議,如有侵權行為,請第一時間聯絡我們修改或刪除,多謝。
標題:特斯拉FSD V11.3將使用神經網絡進行車輛導航和控制
地址:https://www.breakthing.com/post/41497.html